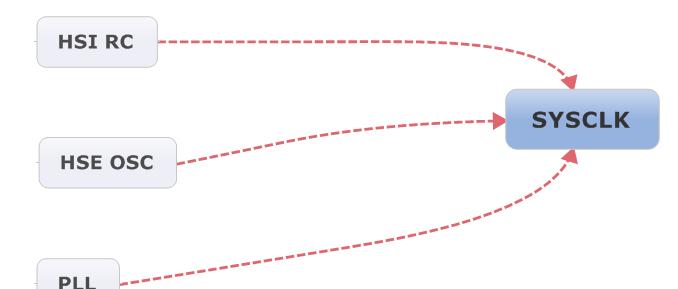
 6、MCO[2:0]可以提供4源不同的时钟同步信号,PA8。7、GPIO口貌似有两个反向串联的二极管用作钳位二极管。
6、MCO[2:0]可以提供4源不同的时钟同步信号,PA8。7、GPIO口貌似有两个反向串联的二极管用作钳位二极管。
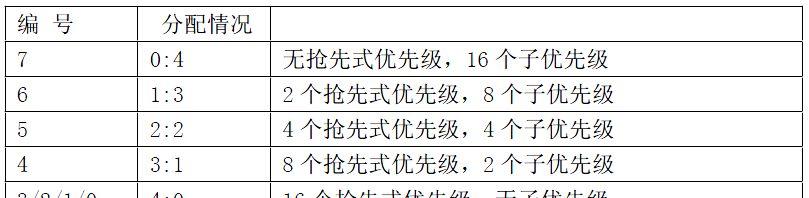 21、0号抢先优先级的中断,可以打断任何中断抢先优先级为非0号的中断;1号抢先优先级的中断,可以打断任何中断抢先优先级为2、3、4号的中断……;构成中断嵌套。如果两个中断的抢先优先级相同,谁先出现,就先响应谁,不构成嵌套。如果一起出现(或挂在那里等待),就看它们2个谁的子优先级高了,如果子优先级也相同,就看它们的中断向量位置了。原来中断向量的位置是最后的决定因素!!!!22、上电初始化后AIRC初始化为0,为16个抢先式优先级,但是由于所有的外部通道中断优先级控制字PRI_n为0,所以抢先式优先级相同,此时就不能嵌套了。23、NVI中有ISER[2](Interrupt
21、0号抢先优先级的中断,可以打断任何中断抢先优先级为非0号的中断;1号抢先优先级的中断,可以打断任何中断抢先优先级为2、3、4号的中断……;构成中断嵌套。如果两个中断的抢先优先级相同,谁先出现,就先响应谁,不构成嵌套。如果一起出现(或挂在那里等待),就看它们2个谁的子优先级高了,如果子优先级也相同,就看它们的中断向量位置了。原来中断向量的位置是最后的决定因素!!!!22、上电初始化后AIRC初始化为0,为16个抢先式优先级,但是由于所有的外部通道中断优先级控制字PRI_n为0,所以抢先式优先级相同,此时就不能嵌套了。23、NVI中有ISER[2](Interrupt
Set-Enable Registers),ICER[2](Interrupt
Clear-Enable Registers),ISPR[2](Interrupt Set-Pending
Registers),ICPR[2](Interrupt Clear-Pending Registers),IABR[2](Active Bit
Registers),IPR[15](InterruptPriority
Registers)定义。其中ISER和ICER分别为中断使能和中断失能寄存器,都是写1来使能/失能中断的。为什么写1?为什么不采用一个寄存器而用两个寄存器来表示中断使能/失能状态?由于硬件,写0比较复杂,并且可能造成其他位的状态改变,所以用1来表示打开或者关断是比较合理的。24、中断标志位需要手动清除。25、配置外围器件的一般步骤:打开端口时钟→定义初始化结构体并初始化→调用。26、串口的奇偶校验:如果是奇偶校验,那么USART_InitStructure.USART_WordLength= USART_WordLength_9b;这个数据的长度必须设定为9位!27、ADC的规则组可以自定义转换通道顺序和转换的通道个数。在实际应用中,有时候希望有一些特别的通道具有很高的优先权,需要在规则组进行转换的时候强制打断,进行另一个通道的转换,这样一组通道,叫做注入组。28、定时器的输出比较模式:Timing(冻结,什么都不做,普通定时),Active(OCxREF输出高电平有效),Inactive(OCxREF输出低电平),Toggle(比较成功后翻转电平)。29、STM32的定时器从0开始计数,满足一些条件,给出标志位(比如匹配成功、时间更新、溢出等)然后从0开始计数。这一点和51不同。30、OCx=OCxREF 极性。31、自动装载寄存器和影子寄存器:前者相当于51当中的溢出设定数值。而影子寄存器顾名思义是影子,就是寄存器的另一分copy。实际起作用的是影子寄存器,而程序员操纵的则是自动装载寄存器。如果APPE位使能,表明自动装载寄存器的值在下一次更新事件发生后才写入新值。否则,写入自动装载寄存器的值会被立即更新到影子寄存器。
 36、高级定时器时钟源挂在了APB2上,而通用定时器挂在APB1上。AHB(72mhz)→APB1分频器(默认2)→APB1时钟信号(36mhz)→倍频器(*2倍)→通用定时器时钟信号(72mhz)。如果APB1没有分频,那么通用定时器的时钟信号频率就直接等于APB1的时钟频率,没有上述的倍频器*2过程。TIM_SetAutoreload()用来改变PWM的频率,TIM_SetCompare1()用来改变占空比37、有刷电机一般启动力矩大一些,无刷电机启动力矩小,运行起来力矩大。有刷电机采用电刷机械电流换向,而无刷电机则通过霍尔传感器测出转子的电流来判断电机的运动位置和方向,返回给控制回路。38、死区是必须要有的,因为这涉及到电路的短路问题。晶闸管在换向的时候需要死区时间来彻底关断线路。39、刹车功能用来在控制回路出现问题时,硬件自动给予外部电机进行紧急刹车制动,反应在PWM上持续给出一个固定的占空比?(三相驱动也是?)40、PWM输出最好采用PWM模式,其他的比较输出模式相位会慢慢改变,不精准。41、对FLASH的读写需要先解锁后加锁。FLASH写0容易,写1难。42、下载程序有两种方式,一种为ICP(在线编程),适用于JTAG或SWD协议下的烧写程序。另一种成为IAP(在应用编程),适用于很多接口(USB,串口,CAN)下载到存储器中,IAP允许在程序运行时重新烧写FLASH。43、FLASH分为主存储器(这里放置用户的程序代码)和信息块(启动代码),除此之外,还有一部分叫做系统存储器,这一块用户不可操作,为ST公司出产后固化,为系统的上电自举程序。44、FLASH在写的时候,一定不能读,如果有读操作,那么将会锁住总线。45、对FLASH操作时,必须打开HIS。46、STM32有两种看门狗(IWDG独立看门狗《独立时钟》,WWDG窗口看门狗《由APB1分频而来》)。47、SPI的的最高频率为36MHz(fpclk/2)。48、 TIM1和TIM8高级定时器在输出PWM时,需要配置一下主输出功能(CtrlPWMOutputs)才能输出PWM。其他的通用定时器不需要这样配置。但是TIM6和TIM7没有PWM输出功能。49、Code为程序代码部分;
36、高级定时器时钟源挂在了APB2上,而通用定时器挂在APB1上。AHB(72mhz)→APB1分频器(默认2)→APB1时钟信号(36mhz)→倍频器(*2倍)→通用定时器时钟信号(72mhz)。如果APB1没有分频,那么通用定时器的时钟信号频率就直接等于APB1的时钟频率,没有上述的倍频器*2过程。TIM_SetAutoreload()用来改变PWM的频率,TIM_SetCompare1()用来改变占空比37、有刷电机一般启动力矩大一些,无刷电机启动力矩小,运行起来力矩大。有刷电机采用电刷机械电流换向,而无刷电机则通过霍尔传感器测出转子的电流来判断电机的运动位置和方向,返回给控制回路。38、死区是必须要有的,因为这涉及到电路的短路问题。晶闸管在换向的时候需要死区时间来彻底关断线路。39、刹车功能用来在控制回路出现问题时,硬件自动给予外部电机进行紧急刹车制动,反应在PWM上持续给出一个固定的占空比?(三相驱动也是?)40、PWM输出最好采用PWM模式,其他的比较输出模式相位会慢慢改变,不精准。41、对FLASH的读写需要先解锁后加锁。FLASH写0容易,写1难。42、下载程序有两种方式,一种为ICP(在线编程),适用于JTAG或SWD协议下的烧写程序。另一种成为IAP(在应用编程),适用于很多接口(USB,串口,CAN)下载到存储器中,IAP允许在程序运行时重新烧写FLASH。43、FLASH分为主存储器(这里放置用户的程序代码)和信息块(启动代码),除此之外,还有一部分叫做系统存储器,这一块用户不可操作,为ST公司出产后固化,为系统的上电自举程序。44、FLASH在写的时候,一定不能读,如果有读操作,那么将会锁住总线。45、对FLASH操作时,必须打开HIS。46、STM32有两种看门狗(IWDG独立看门狗《独立时钟》,WWDG窗口看门狗《由APB1分频而来》)。47、SPI的的最高频率为36MHz(fpclk/2)。48、 TIM1和TIM8高级定时器在输出PWM时,需要配置一下主输出功能(CtrlPWMOutputs)才能输出PWM。其他的通用定时器不需要这样配置。但是TIM6和TIM7没有PWM输出功能。49、Code为程序代码部分;
RO-data表示程序定义的常量;
RW-data表示已初始化的全局变量;
ZI-data表示未初始化的全局变量,以及初始化为0的变量;
Code, RO-data,RW-data…………..flash;
RW-data, ZIdata……………….RAM;
初始化时,RW-data从flash拷贝到RAM。
50、STM32F103ZET6有144个引脚(Z为144),其中,可用IO口为112个(7X16=112,ABCDEFG口)。51、ARM公司只生产内核标准,不生产芯片。ST、TI这样的公司从ARM公司那里购买内核,然后外加自己的总线结构、外设、存储器、始终和复位、I/O后就组成了自己的芯片。
 68、OLED,即有机发光二极管(OrganicLight-Emitting Diode),又称为有机电激光显示(Organic Electroluminesence Display,OELD)。下图为OLED的GRAM与屏幕的对应表:
68、OLED,即有机发光二极管(OrganicLight-Emitting Diode),又称为有机电激光显示(Organic Electroluminesence Display,OELD)。下图为OLED的GRAM与屏幕的对应表:
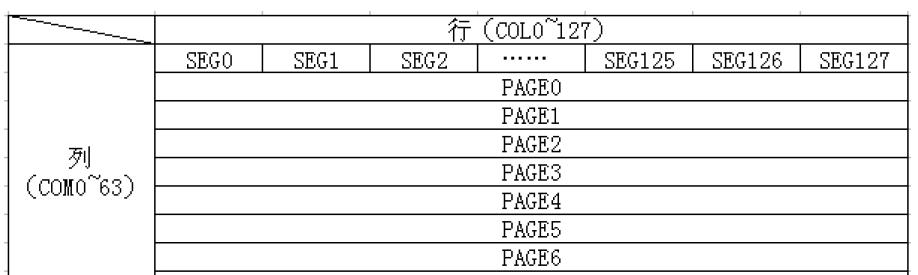 PAGE2单独列出来:
PAGE2单独列出来:
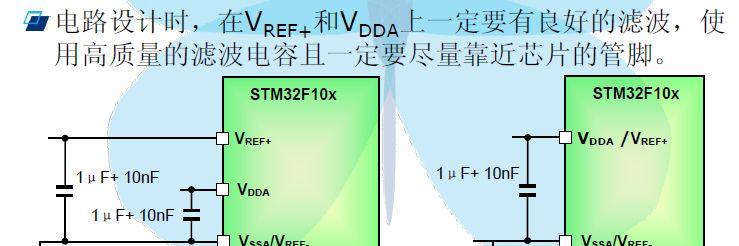
 71、ADC的Vref 和Vdda与VSS,Vref-一定要加高质量的滤波电容,切靠近单片机。
71、ADC的Vref 和Vdda与VSS,Vref-一定要加高质量的滤波电容,切靠近单片机。
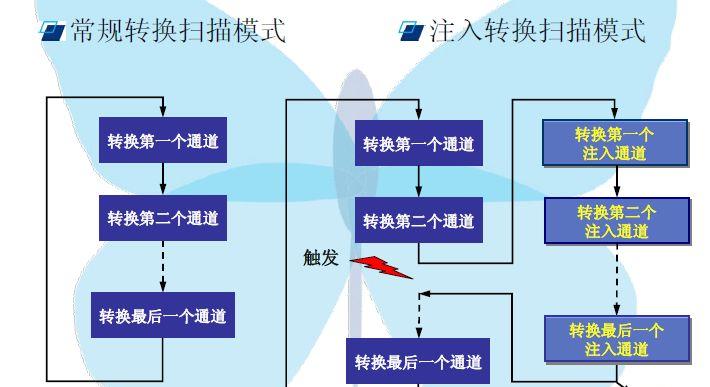
 72、ADC分为规则组和注入组,前者有16个通道,后者有4个通道。并且16个通道公用一个数值寄存器,注入组的4个通道分别有一个数值寄存器。
72、ADC分为规则组和注入组,前者有16个通道,后者有4个通道。并且16个通道公用一个数值寄存器,注入组的4个通道分别有一个数值寄存器。
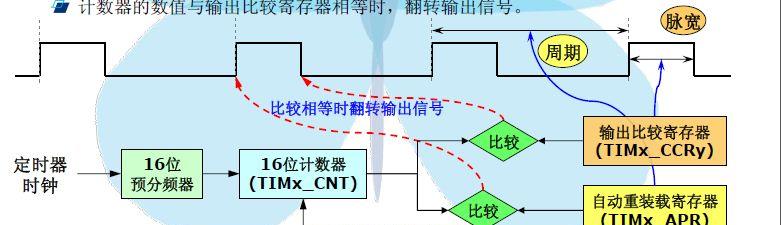
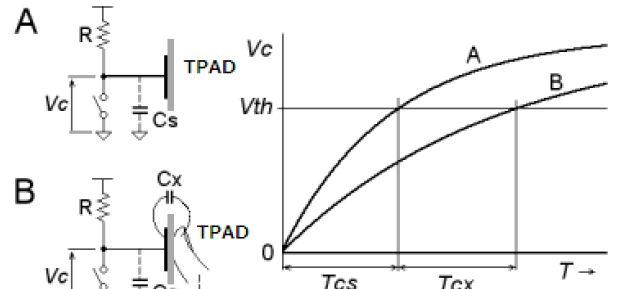
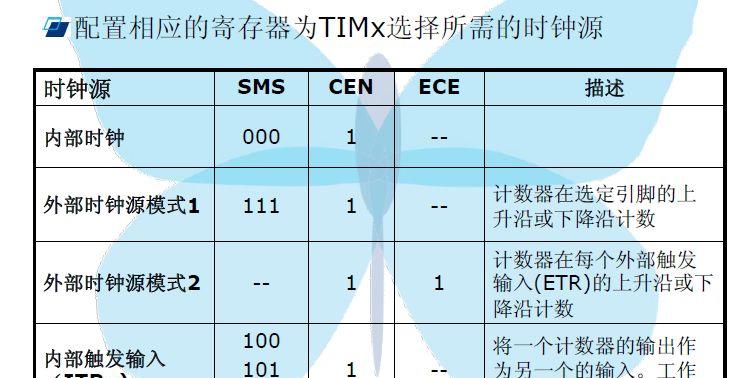
 73、采样频率越高,输入阻抗要求越小。74、Stm32进入中断的最短周期为6个周期。75、如图:
73、采样频率越高,输入阻抗要求越小。74、Stm32进入中断的最短周期为6个周期。75、如图:
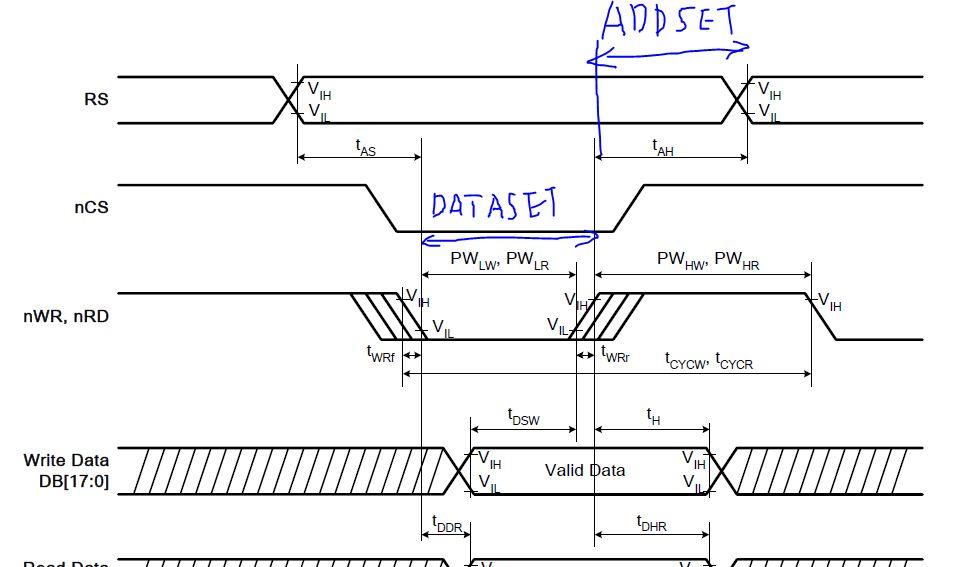
 76、如图:
76、如图:
 77、FSMC,即灵活的静态存储控制器。能够与同步或异步存储器和16位PC存储器卡接口,STM32的FSMC接口支持包括SRAM、NANDFLASH、NORFLASH和PSRAM等存储器。78、平时所说的U盘里的FLASH存储器有两种类型:NANDflash和NOR flash。NAND FLASHNOR FLASH不能直接运行里面的代码可以直接运行里面的代码写入和擦除速度快写入和擦除速度慢读取速度稍慢读取速度稍快擦写周期100万次擦写周期10万次成本低,容量高成本高,容量低一般为串行接口有SRAM接口79、TFT在操作时,可以当作外部SRAM来操作,这样的话,如果单片机有FSMC接口,就可以使用NORFLASH的SRAM接口去控制,速度非常快。80、Stm32的的FSMC有4个256MB的存储块,一共寻址1GB的外部存储器空间。
77、FSMC,即灵活的静态存储控制器。能够与同步或异步存储器和16位PC存储器卡接口,STM32的FSMC接口支持包括SRAM、NANDFLASH、NORFLASH和PSRAM等存储器。78、平时所说的U盘里的FLASH存储器有两种类型:NANDflash和NOR flash。NAND FLASHNOR FLASH不能直接运行里面的代码可以直接运行里面的代码写入和擦除速度快写入和擦除速度慢读取速度稍慢读取速度稍快擦写周期100万次擦写周期10万次成本低,容量高成本高,容量低一般为串行接口有SRAM接口79、TFT在操作时,可以当作外部SRAM来操作,这样的话,如果单片机有FSMC接口,就可以使用NORFLASH的SRAM接口去控制,速度非常快。80、Stm32的的FSMC有4个256MB的存储块,一共寻址1GB的外部存储器空间。
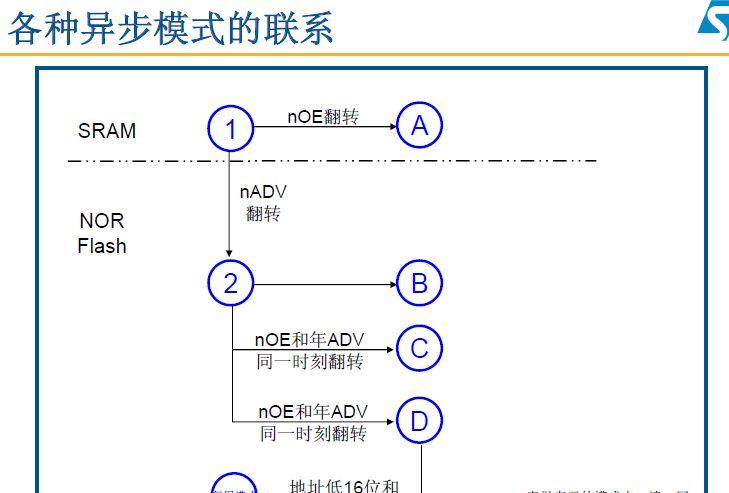
 83、各种异步模式的联系:
83、各种异步模式的联系:
 84、NOR Flash/PSRAM控制器时序配置:
84、NOR Flash/PSRAM控制器时序配置:
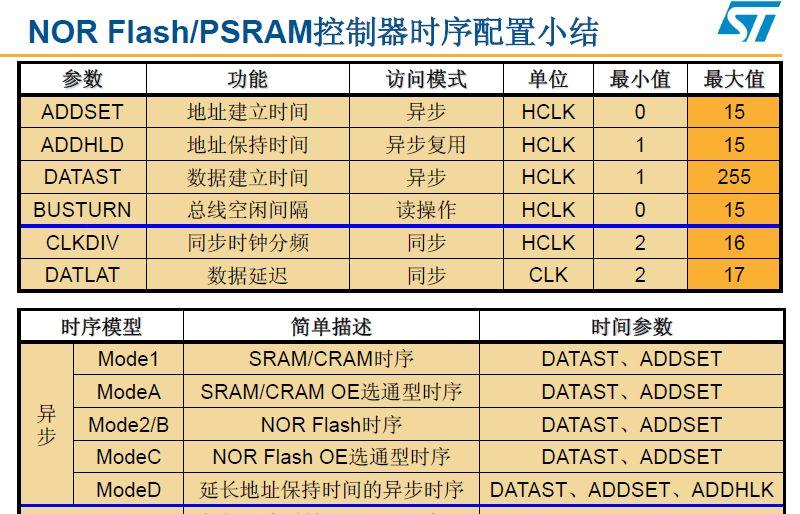 85、FSMC的三个配置寄存器:FSMC_BCRx(片选控制配置)、FSMC_BTRx(片选时序)、FSMC_BWTRx(片选写时序)。86、RTC时钟配置必须要用到BKP寄存器,BKP寄存器在单片机复位、电源复位、待机唤醒模式下是不会更改值的,他的供电由VDD供电,VDD被切断后自动切换至外部的VBAT供电。87、要修改BKP寄存器的值,必须取消其写保护的标志。BKP寄存器在上电时自动写保护。88、 Stm32有三种省电模式:
85、FSMC的三个配置寄存器:FSMC_BCRx(片选控制配置)、FSMC_BTRx(片选时序)、FSMC_BWTRx(片选写时序)。86、RTC时钟配置必须要用到BKP寄存器,BKP寄存器在单片机复位、电源复位、待机唤醒模式下是不会更改值的,他的供电由VDD供电,VDD被切断后自动切换至外部的VBAT供电。87、要修改BKP寄存器的值,必须取消其写保护的标志。BKP寄存器在上电时自动写保护。88、 Stm32有三种省电模式:
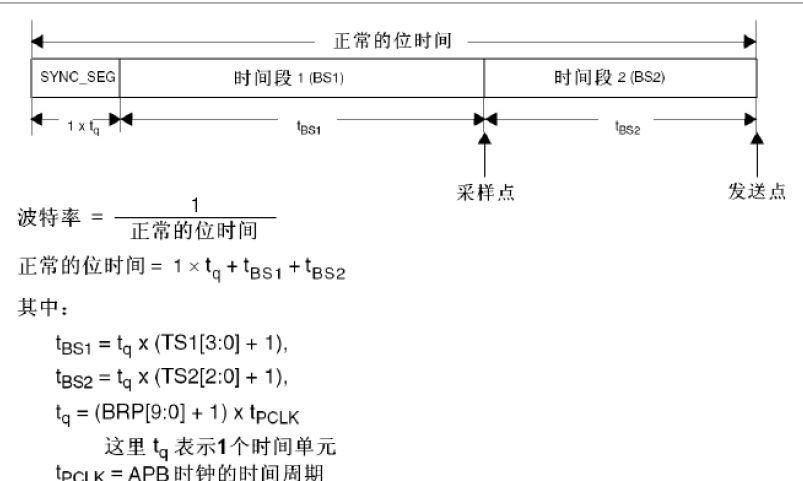
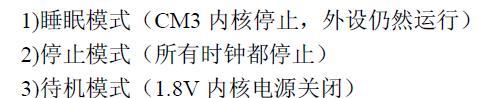 这三种省电模式中,耗电量从上到下依次降低,待机模式的电流仅为2uA。89、从待机模式中唤醒单片机等效于让单片机复位,但是电源寄存器的值会有一个标志位指示单片机是被唤醒的,不是被复位的。90、ADC的时钟不要超过14MHz,否则转换精度会下降。最大转换速率为1MHz,即转换周期为1us(14MHz,采样周期为1.5个ADC时钟)。91、Tcovn=采样时间 12.5个周期。采样时间尽量选长一点,这样精度高一些,但是转换速率下降,这也是有利必有弊。92、ARM处理器架构进化史:
这三种省电模式中,耗电量从上到下依次降低,待机模式的电流仅为2uA。89、从待机模式中唤醒单片机等效于让单片机复位,但是电源寄存器的值会有一个标志位指示单片机是被唤醒的,不是被复位的。90、ADC的时钟不要超过14MHz,否则转换精度会下降。最大转换速率为1MHz,即转换周期为1us(14MHz,采样周期为1.5个ADC时钟)。91、Tcovn=采样时间 12.5个周期。采样时间尽量选长一点,这样精度高一些,但是转换速率下降,这也是有利必有弊。92、ARM处理器架构进化史:
 93、拿ARM7TDMI来说,T代表Thumb指令集,D是说支持JTAG调试(Debugging),M意指快速乘法器,I则对应一个嵌入式ICE模块。94、 MMU作为嵌入式处理器与应用处理器的分水岭标志à具有内存管理单元的嵌入式处理器可以定位为应用处理器。这么说M系列和A系列的处理器的区别在于A系列的处理器具有MMU单元可以进行内存模块的管理。95、ARM处理器有两种状态:ARM状态和Thumb状态。
93、拿ARM7TDMI来说,T代表Thumb指令集,D是说支持JTAG调试(Debugging),M意指快速乘法器,I则对应一个嵌入式ICE模块。94、 MMU作为嵌入式处理器与应用处理器的分水岭标志à具有内存管理单元的嵌入式处理器可以定位为应用处理器。这么说M系列和A系列的处理器的区别在于A系列的处理器具有MMU单元可以进行内存模块的管理。95、ARM处理器有两种状态:ARM状态和Thumb状态。
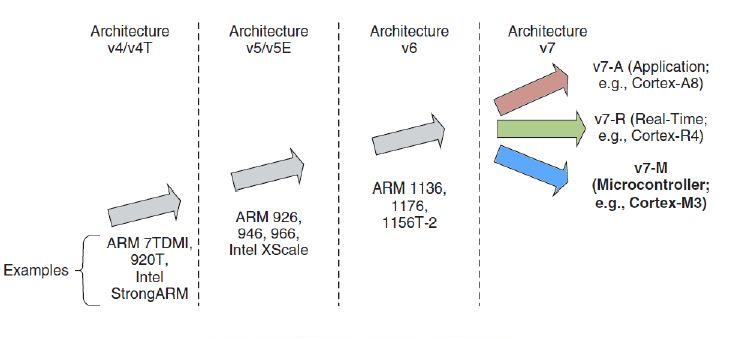
 96、这张图说明了一切:Thumb2指令集做了一件很伟大的事情:将16位和32位的指令集融为一体,兼容性非常强!(这么说CM3不支持某些32位ARM指令集??)97、如图:
96、这张图说明了一切:Thumb2指令集做了一件很伟大的事情:将16位和32位的指令集融为一体,兼容性非常强!(这么说CM3不支持某些32位ARM指令集??)97、如图:
 98、MSP是系统复位后使用的堆栈指针,PSP由用户的代码使用。两个堆栈指针为4字节对齐!!99、在ARM编程领域中,凡是打断程序运行的事件,统称为异常(exception)。100、因为存在LR(链接寄存器),所以可支持1级的子程序调用而不用压栈到内存,大大提高了运行速度。—à这就是说,我们在编程的时候,一级调用是不会耗费太多时间的,除非是二级调用!101、处理器有两种操作模式:handler模式和线程模式。
98、MSP是系统复位后使用的堆栈指针,PSP由用户的代码使用。两个堆栈指针为4字节对齐!!99、在ARM编程领域中,凡是打断程序运行的事件,统称为异常(exception)。100、因为存在LR(链接寄存器),所以可支持1级的子程序调用而不用压栈到内存,大大提高了运行速度。—à这就是说,我们在编程的时候,一级调用是不会耗费太多时间的,除非是二级调用!101、处理器有两种操作模式:handler模式和线程模式。
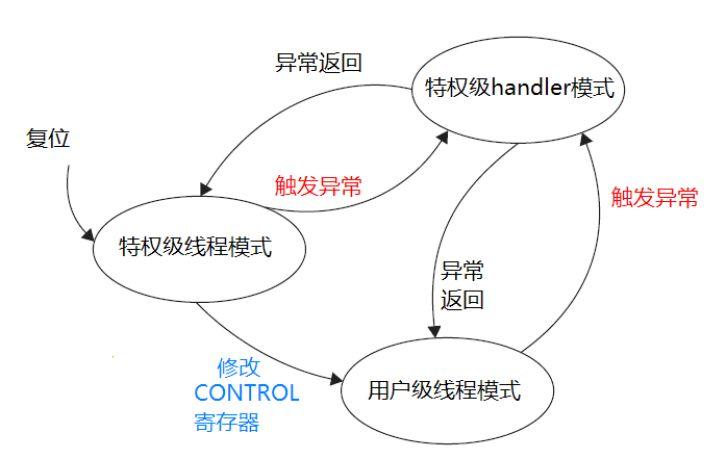 处理器也有两种特权分级:特权级和用户级。这张图说明了一切:复位进入特权级线程模式,如果有异常,进入特权级的handler模式处理异常或中断例程,然后返回至特权级线程模式。通过修改CONTROL寄存器可以进入用户级线程模式。102、两个高级定时器TIM1和TIM8是挂接在APB1总线上。103、STM32的外部中断是以组来区分的,也就是说PA0,PB0,PC0单片机是无法区分其中哪个触发的中断à均为EXIT0线中断服务例程。所以,外部中断支持16路的中断分辨率。从另一个方面来讲,我们可以设置GPIO_EXTILineConfig(GPIO_PortSourceGPIOx,
处理器也有两种特权分级:特权级和用户级。这张图说明了一切:复位进入特权级线程模式,如果有异常,进入特权级的handler模式处理异常或中断例程,然后返回至特权级线程模式。通过修改CONTROL寄存器可以进入用户级线程模式。102、两个高级定时器TIM1和TIM8是挂接在APB1总线上。103、STM32的外部中断是以组来区分的,也就是说PA0,PB0,PC0单片机是无法区分其中哪个触发的中断à均为EXIT0线中断服务例程。所以,外部中断支持16路的中断分辨率。从另一个方面来讲,我们可以设置GPIO_EXTILineConfig(GPIO_PortSourceGPIOx,
GPIO_PinSourcex);来开通中断线实现组内的不同中断。104、DAC有两个寄存器,一个是DHR(Data
HoldingRegister)数据保持寄存器,一个DOR(Data Output
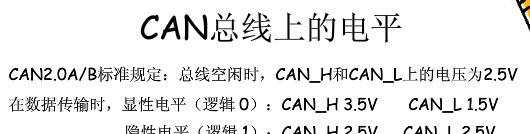
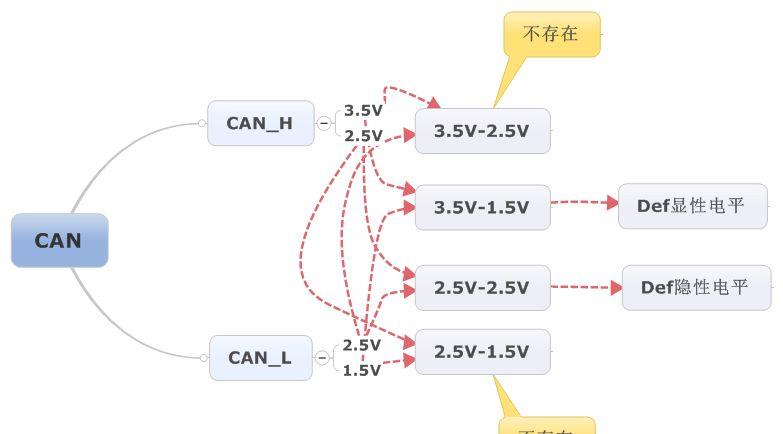
Register)数据输出寄存器。真正起作用的是DOR寄存器,该寄存器把值给数模转换发生单元输出以VREF 为参考电压的电压值。如果是硬件触发转换,系统将在1个ABP时钟周期后把值给DOR,如果是软件触发转换,时间为3个APB时钟周期。然后,均等待Tsetting时间(Typical为3us,Max为4us)后真正输出电压值。105、DAC分8位模式和12位模式,其中后者可以选择左右对齐。106、DMA仲裁器分为软件和硬件两种。软件部分分为4个等级,分别是很高优先级、高优先级、中等、低。硬件部分由通道的大小来决定优先级,越低优先级越高。107、DMA有一个实时的传输数据量寄存器叫做DMA_CNDTR,最大值为65535,存放的是当前传输所要传输的数据量。当数据量变为0时,表明传输完成。108、 CAN总线(ControllerArea Network)。CAN控制器根据两根线上的电位差来判断总线电平,总线电平又分为显性电平和隐性电平,二者必居其一。109、CAN总线具有以下六个特点:
通讯速度较快,通讯距离较远(1Mbps下40M,5kbps下10KM);
具有错误检测、错误通知(通知其他设备)和错误恢复功能(强制结束发送,重复发送接收错误的信息。);
故障封闭,当总线上的设备发生连续故障错误时,CAN控制器会把改控制器踢出总线;
连接节点多。理论上可以无限制加载,但是受到时间延迟和电气负载的限制,实际数目是有限制的。降低传输速度可以适当增加可挂接负载个数。
110、CAN协议有两个标准,ISO11898(针对125kbps~1Mbps的高速速率)和ISO11519-2(125kbps以下的低速速率)。
 111、如图:
111、如图:
 112、CAN协议的有5种类型的帧:数据帧、遥控帧、错误帧、过载帧、帧间隔。其中前两种帧有标准格式(11位ID)和扩展格式(29位ID)。
112、CAN协议的有5种类型的帧:数据帧、遥控帧、错误帧、过载帧、帧间隔。其中前两种帧有标准格式(11位ID)和扩展格式(29位ID)。
帧起始:表示数据开的段帧起始。
仲裁段:表示该帧优先级的仲裁段。
控制段:表示数据的字节及保留位段。
数据段:数据的内容,一帧可发送0~8个字节的数据。
CRC段:检查帧的传输错误段。
ACK段:表示确认正常接收的段。
帧结束:表示数据的段帧结束。
 118、触摸屏一般分为电阻式触摸屏和电容式触摸屏。前者检测触摸的位置原理是利用触摸屏控制器中的A/D转换器经过两次A/D读值后得出X和Y的坐标值。注意:这个X和Y的值是相对于触摸屏的,而非LCD屏。所以在这里需要注意两个概念:触摸屏和LCD屏。这是两个不同的概念,也是两个不同的物理结构,其中电阻触摸屏是由上下两个导电层中间夹着一层非常薄的透明隔层;而LCD就是指显示屏。119、 电阻触摸屏有X和Y、X和Y的比例因子、坐标轴方向、偏移量。LCD也有自己的这些参数。两者完全不相干,所以在定位的时候需要进行坐标转换。公式:
118、触摸屏一般分为电阻式触摸屏和电容式触摸屏。前者检测触摸的位置原理是利用触摸屏控制器中的A/D转换器经过两次A/D读值后得出X和Y的坐标值。注意:这个X和Y的值是相对于触摸屏的,而非LCD屏。所以在这里需要注意两个概念:触摸屏和LCD屏。这是两个不同的概念,也是两个不同的物理结构,其中电阻触摸屏是由上下两个导电层中间夹着一层非常薄的透明隔层;而LCD就是指显示屏。119、 电阻触摸屏有X和Y、X和Y的比例因子、坐标轴方向、偏移量。LCD也有自己的这些参数。两者完全不相干,所以在定位的时候需要进行坐标转换。公式:
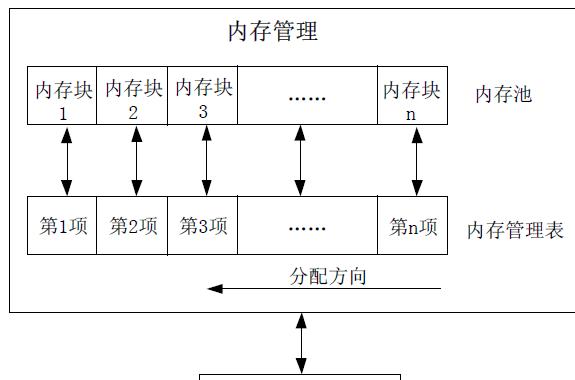 内存管理有一种方式叫做分块式内存管理。注意表中的分配方向,从顶到底。每一项对应一个内存块。里面的数值代表了内存池的状态:如果为0,表示该内存没有被分配;如果非0,那么数值的大小就表示了该块内存被连续占用的内存数。比如说数值为20,意思是包括该项在内的内存块被连续占用了20块分给了指针。134、SD卡的分类:
内存管理有一种方式叫做分块式内存管理。注意表中的分配方向,从顶到底。每一项对应一个内存块。里面的数值代表了内存池的状态:如果为0,表示该内存没有被分配;如果非0,那么数值的大小就表示了该块内存被连续占用的内存数。比如说数值为20,意思是包括该项在内的内存块被连续占用了20块分给了指针。134、SD卡的分类:
 一般的SD卡支持两种传输模式:SD卡模式(SDIO)、SPI模式。显然前面一种是专用模式,所以速度比较快。135、常用的汉字内码系统有GB2313、GB13000、GBK、BIG5(繁体)。其中GB2313只有几千个汉字,而GBK则有2万多汉字。136、
一般的SD卡支持两种传输模式:SD卡模式(SDIO)、SPI模式。显然前面一种是专用模式,所以速度比较快。135、常用的汉字内码系统有GB2313、GB13000、GBK、BIG5(繁体)。其中GB2313只有几千个汉字,而GBK则有2万多汉字。136、
要显示汉字,采用的方式如果用点阵的形式是不可取的,因为这无法查找汉字。采用的方式就是内码系统。GBK标准中,一个汉字对应2个字节:前者称为区(0x81~0xFE)后者为(0x40~0x7E)和(0x80~0xFE)。前者有126个区,后者有190,那么可以显示的汉字数量有126*190=23940个。根据这两个值用来查找字库,字库中存放的还是每个汉字的点阵数据。这个字库非常大,如果是16*16的字体,那么一个字体就需要32个字节,如此说来需要23940*32=748K的空间,可见非常大,所以需要外部的Flash来存储这个字库。137、由于汉字内码系统不具有国际通用性,但是Unicode几乎把所有的语言都放置进来,这样在单片机中操作汉字时,就需要将GBK和Unicode转化。尤其是在FATFS中,创建中文文件名和读取中文文件信息时需要将Unicode换转为GBK后再进行修改操作,再反转换成Unicode保存修改。这么说,两者的存在是由于标准的不统一,并且Unicode中只有6064个汉字,而GBK显然是一种汉字扩展。138、BMP图片编码的顺序是从左到右,从下到上。139、VS1053是一款高性能的数字音频解码芯片,从SD卡中将mp3等音乐音频文件通过SPI送给VS1053后,由其进行音频解码,输出音乐给耳机。耳机驱动可以采用TDA1308芯片,这款芯片为AB类耳机驱动芯片。
 140、IAP(In Application Programming)在应用编程是为了后期开发更新程序方便而提出的概念。具体的实现方法如下图所示:
140、IAP(In Application Programming)在应用编程是为了后期开发更新程序方便而提出的概念。具体的实现方法如下图所示:
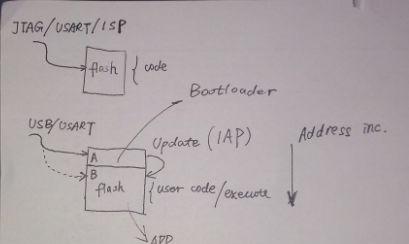 在普通编程中,flash中的code是通过JTAG和ISP等工具下载到单片机中。而在IAP编程中,flash被分区为A和B两个区域,A区域只允许用USB/USART等方式下载,此区域作为更新B区域的代码用。B区域则是用户的code区域,真正的代码在这里被执行,放置的就是app。
在普通编程中,flash中的code是通过JTAG和ISP等工具下载到单片机中。而在IAP编程中,flash被分区为A和B两个区域,A区域只允许用USB/USART等方式下载,此区域作为更新B区域的代码用。B区域则是用户的code区域,真正的代码在这里被执行,放置的就是app。
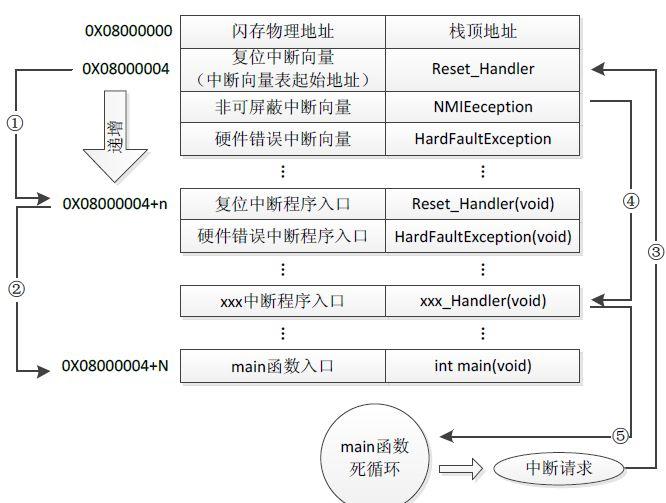 上图表示STM32正常运行的流程图,可以看到上电复位后系统从0x80000004处开始运行程序,这里放置的是复位中断向量,然后跳转至复位中断程序入口后再跳转至main函数运行用户的程序。
上图表示STM32正常运行的流程图,可以看到上电复位后系统从0x80000004处开始运行程序,这里放置的是复位中断向量,然后跳转至复位中断程序入口后再跳转至main函数运行用户的程序。
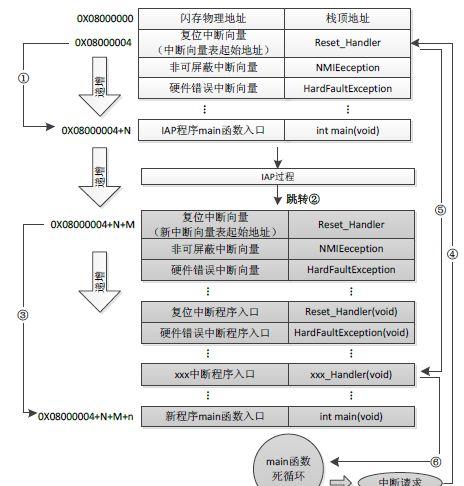 上图表示加入IAP后的STM32程序运行流程图。可以看到上电复位后跳到IAP程序的main函数处运行IAP过程(这个过程就是把下面灰底色块的程序代码烧进B区域à代码更新)。后面的过程和STM32正常运行一样,如果出现中断请求,还是跳转到A区域中的中断向量表中,然后再跳转到B区域的中断服务入口。141、USB有四根线,VCC、GND、D 、D-。在USB主机上,D 和D-均通过一个15K的电阻接地,这样两条线均为低电平。在USB设备中,对于高速设备会在D 通过一个1.5K的电阻接到VCC,而低俗设备会在D-通过一个1.5K的电阻接到VCC。这样主机就可以通过D 和D-的高电平的到来来检测是否有设备接入,并且识别高低速设备。142、UCOSII是一种实时操作系统,具有执行效率高、占有空间小(最小内核2KB)、实施性能优良、扩展性强和移植性强等优点。
上图表示加入IAP后的STM32程序运行流程图。可以看到上电复位后跳到IAP程序的main函数处运行IAP过程(这个过程就是把下面灰底色块的程序代码烧进B区域à代码更新)。后面的过程和STM32正常运行一样,如果出现中断请求,还是跳转到A区域中的中断向量表中,然后再跳转到B区域的中断服务入口。141、USB有四根线,VCC、GND、D 、D-。在USB主机上,D 和D-均通过一个15K的电阻接地,这样两条线均为低电平。在USB设备中,对于高速设备会在D 通过一个1.5K的电阻接到VCC,而低俗设备会在D-通过一个1.5K的电阻接到VCC。这样主机就可以通过D 和D-的高电平的到来来检测是否有设备接入,并且识别高低速设备。142、UCOSII是一种实时操作系统,具有执行效率高、占有空间小(最小内核2KB)、实施性能优良、扩展性强和移植性强等优点。
猜你喜欢:
分享两点提高编程能力的建议!
学STM32需要学会哪些才建议去学Linux?
嵌入式如何进行架构设计?
干货 | 嵌入式OTA升级实现原理
学STM32需要学会哪些才建议去学Linux?
一个小巧灵活的按键处理库!
嵌入式 C 结构体内存对齐
一份很棒的外设驱动库!(基于STM32F4)
嵌入式开发中常见3个的C语言技巧
一个很棒的智能配网方案!